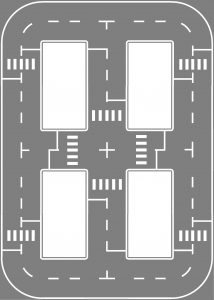
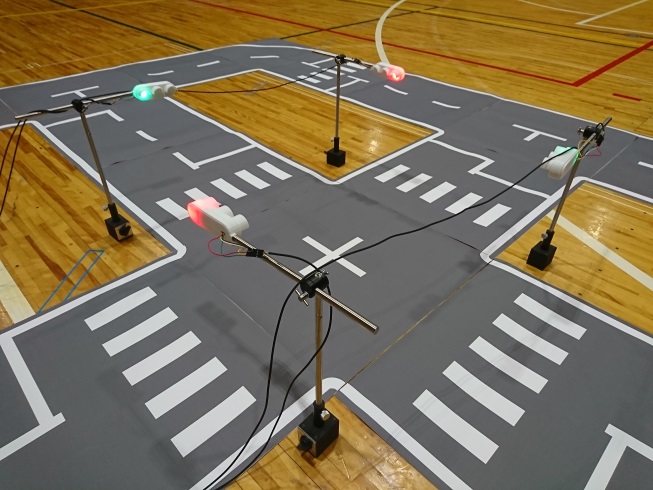
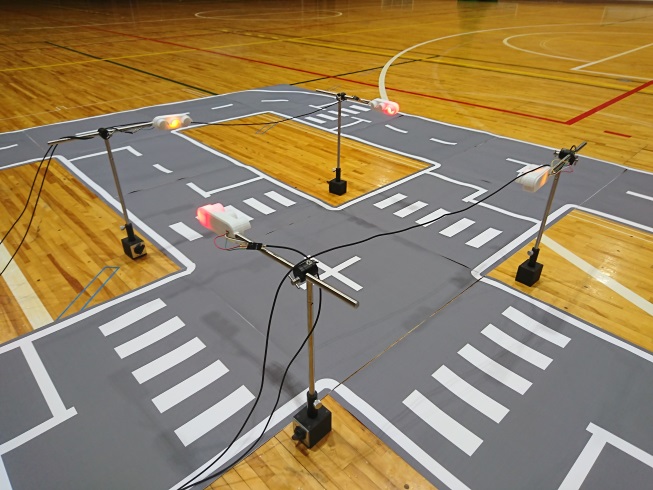
以下に示すようなミニチュアの道路上にFPGAにより制御された自動車を走らせ、道路をはみ出さずに走ること、指示通りの道順で道路を走ること、信号機の認識、横断歩道の認識、交差点の認識、障害物の認識、人(人形)の認識等の課題を順次クリアしてもらいます。これらの課題は全てクリアできなくても構いません。1つでも多くの課題をクリアできるようにFPGAのアルゴリズムを開発してください。また、実車での走行を模擬しますので、できるだけ環境にロバストに対応できるように設計してください。
自動車の車体は何を使用しても構いませんが、コンテストで使用する道路の片側車線をはみ出さない大きさとしてください。CCD/CMOSカメラの使用を強く推奨しますが、各種センサー(光、超音波、電磁波他)も併用してもらってかまいません。ただし、CCD/CMOSカメラのみで自動走行を実現した方が、各種センサーを使用した場合、もしくはCCD/CMOSカメラと各種センサーを併用した場合に比べてスコアが高くなるように評価します。アルゴリズムは必ずFPGA内に実装して下さい。FPGAのタイプに制限は設けません。また、モーターのドライブ電力も含めワット時定格量100Wh未満のバッテリーで動作できるように設計してください。リモートでの情報の送受信や制御は禁止します。
今年はFPT’21バージョン(リモートでチューニングし,リモートでコンテストに参加する、コースに立ち入ることができないコンテスト)とFPT’19バージョン(コースに立ち入ってチューニングが可能なコンテスト)の2つを実施します。詳しくはFPT’21, FPT’19のデザインコンテストのホームページを参照してください。
開発条件
| FPGA | 自由 |
| アルゴリズム | アルゴリズムは何を使用しても良い。ただし、アルゴリズムはFPGA内に実装すること。 |
| FPGA内ハードマクロの使用 | FPGA内にあるものであれば、ハードマクロプロセッサも含め何でも使用して良い。 |
| ボード上メモリ | FPGAボードに実装されている外部メモリも制限なく使用して良い |
| バッテリー | 全てのシステムがワット時定格量100Wh未満のバッテリーで動作できるように設計すること。リチウムイオン電池の場合、コネクタの改造は禁止。標準品をそのまま使用すること。飛行機内に持ち込める仕様としておくこと(*)。電池のセルを抽出してセル単体で使用する等の改造は絶対にやめてください。火傷や火災の危険性があります。過電流保護回路の付いた標準品を使用し、かつ発熱等に十分に注意を払い使用するようにしてください。 |
| センサー | 各種センサー(光、超音波、電磁波他)の使用に制限は設けないが、CCD/CMOSカメラのみで自動走行を実現した場合、評価を高くする。課題により双方を使い分けたい場合にはセンサー類を脱着できるように考慮しておくこと。(注)センサーが実装されていれば使用してるものと判断する。 |
| 自動車の大きさ | 20cm(長さ)×20cm(幅)程度が望ましい。 (道路の片車線幅:約30cm) |
| 自動車のスピード | 自動車のスピードは評価項目に入れない。ただし、各課題に制限時間(3分)を設けるので、その時間以内にゴールすること。 |
| リモート機能 | リモートで自動車と情報のやりとりをすることやリモートで自動車の制御をすることは禁止。 |
*飛行機の移動でコンテストに参加される方へ
コンテストの機材、ロボットの機内持ち込みに関しては、以下のホームページを参考にして下さい。
https://www.gov-online.go.jp/useful/article/201412/4.html
自動走行プログラム
以下に走行例を示します。ただ、決勝戦においては以下の走行例以外の予告をしない課題も準備します。実社会で自動車が走り、事故を起こさないための技術開発ですので、外乱に惑わらされない安全技術を開発してください。道路については左車線走行と考えてください。課題に対する質問は「連絡先」までお問い合わせください。
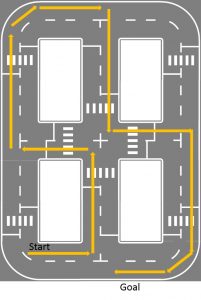
- 例1:大会当日までにルートを示します。その指示に従って自動車を走らせてください。以下の例1のコースは一例にすぎません。ルートの間違い、右車線へのはみ出し、道路からのはみ出しは即走行中止となります。必ず、評価シートとコースアウト判定の資料に目を通しておいてください。
- 例2:交差点の曲がり方を示します。図中に走行禁止領域を赤色で示していますので、赤色のゾーンに入らないように自動車を制御してください。赤色の領域に入った場合には減点となります。
 |  |  | 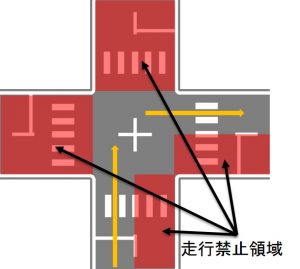 |
| 直進 | 直進 | 左折 | 右折 |
 |  |  | 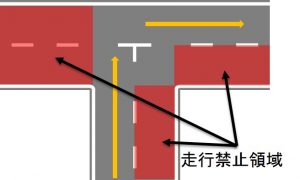 |
- 例3:左車線上に障害物がある時には回避行動をとってください。障害物が置かれたタイル(70cm×70cm)を起点として前後1タイル分(±70cm)は右車線に入ってかまいません。ただし、以下の図に示すように1タイル分をオーバーする前に左車線に戻ってください。下の図を参考にして下さい。赤い領域に入ってはいけません。また、右車線に障害物があっても無視をして下さい。停止した場合には減点となります。
 | 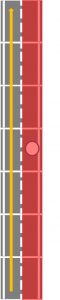 |
| 回避行動例 | そのまま直進する例 |
- 例4:信号器が赤であれば停止線の手前、0cm~20cmの範囲で停止して下さい。この時、白線をオーバーした場合には減点します。また、赤信号で停止しなかった場合にも減点をします。一方、信号機が青や黄色の場合には交差点や横断歩道をそのまま走行して下さい。青信号や黄色信号で停止した場合にも減点となります。

- 例5:人(人形:静止)が横断歩道を渡っている時には横断歩道を渡りきるまで停止線で停止しておいてください(図a)。停止の条件は例4と同じです。自分の走行車線では無い右車線側の横断歩道を歩いている時でも必ず停止して下さい(図b)。また、信号の無い横断歩道の端で人(人形:静止)が待っている時にも停止してください(図c)。横断歩道とは関係の無い場所で人(人形:静止)が立っている場合にはそのまま素通りして下さい(図d)。また、信号機のある横断歩道の場合、青信号でも信号無視をして渡っている人がいれば停止線で止まって下さい(図e)。信号機のある横断歩道の端で人が待っている場合には信号機に従って下さい(図f)。つまり、青であればそのまま素通りし、赤であれば停止してください。人が横断歩道では無い場所や信号機の無い道路上を渡っている時にも、歩行者が右車線、左車線のいずれにいた場合でも、人の手前で必ず停止して下さい(図g)(図h)。迂回して通り過ぎてはいけません。
 |  |  | |
| (a) | (b) | (c) | (d) |
 |  | ||
| (e) | (f) | (g) | (h) |
評価シート
・こちら(Evaluation Sheet ※Excel) をご参照下さい。
コースアウト基準
・こちら(Run off judgement ※PowerPoint)をご参照下さい。
コンテストで使用する道路データ
A0サイズのPPTデータとして道路部品データを用意しています。このまま印刷し、適切に道路部品を並べれば、大会と同じ道路を再現することができます。印刷費が気になる方は「人工知能とHW/SW協調設計ワークショップ」にご出席下さい。大会と同環境でのテストが可能です。
・道路データ
コンテストで使用する信号機
コンテストで使用する信号機のモデルを提示します。信号機の高さは地面から約40cmとします。信号の動作は以下の動画にて確認してください。
・動作確認用動画・3Dデータ
 |  | 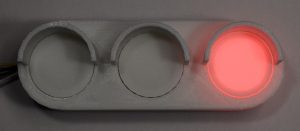 |
| (a) 青色点灯 | (b) 黄色点灯 | (c) 赤色点灯 |
 |  |  |
 |
|
|
信号機の詳細
コンテストで使用する人形
コンテストで使用する人形のモデルを提示します。大きさは約20cmです。
いろいろなポーズをとることができます。また、服を着る可能性もあります。
 |  |  |
WEB page:https://store.shopping.yahoo.co.jp/ys-firstmarket/ch0544.html?sc_e=slga_pla
コンテストで使用する障害物
コンテストで使用する障害物を掲示します。写真の人形はサイズ比較のために置いています。
・3Dデータ
 |  |  |
|---|---|---|
 |  |  |
★ロボットの例
ZYBOt
http://www.ritsumei.ac.jp/se/re/izumilab/lecture/16zybot/
http://www.ritsumei.ac.jp/se/re/izumilab/lecture/16zybot/0_ZybotR.html
https://reference.digilentinc.com/learn/programmable-logic/tutorials/zybo-zybot-guide/start?redirect=1
TurtleBot3
http://www.turtlebot.com/
A-Cute Car Robotics Kit (Terasic)
http://www.terasic.com.tw/cgi-bin/page/archive.pl?Language=English&No=1018
Lego Mindstorm
https://www.lego.com
Simulation tool
FPT_simulator
https://github.com/sousou1/FPT_simulator